


日期:2022-10-07 浏览量:
近日,贵州理工学院人工智能与电气工程学院杨晓武博士以第一作者和通信作者身份在国际著名SCI期刊非线性动态学《Nonlinear Dynamics》(JCR 1区,中科院二区,影响因子IF = 5.741)上发表题为《Predefined-time robust control with formation constraints and saturated controls》研究论文,并被Web of Science数据库检索。
多智能体系统在协同监控,机器人跟踪以及无人机编队控制领域得到广泛应用。本文针对带有理想编队和饱和控制输入约束的多智能体系统控制问题,在引航者-跟随者(leader–follower)控制体系下,提出了一种预设时间分布式鲁棒编队控制方法,该方法具有动态隐式学习能力,保证每个智能体仅利用局部量测信息来实现控制目标;同时,所提出算法的收敛时间由系统参数来确定,可以消除收敛时间依赖于随机选择的初始状态。仿真结果验证了所得理论的有效性。该研究成果对非线性多智能体系统协同控制研究具有重要的理论意义,同时为实践工程提供参考依据。
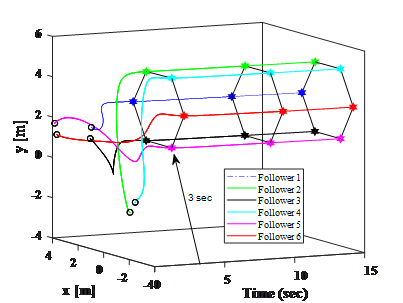
跟随者的变化轨迹
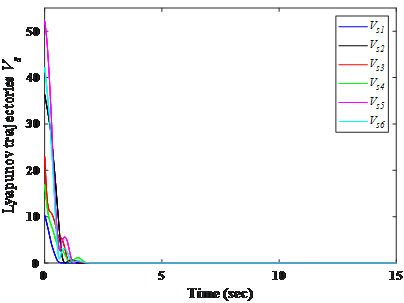
跟随者的李雅普诺夫函数演化行为
地址:贵州省贵阳市花溪区博士路 邮编:550025 电话:0851-88121166 传真:88121166
?贵州理工学院版权所有 ICP备案号:黔ICP备13005433号-1

